
")




")



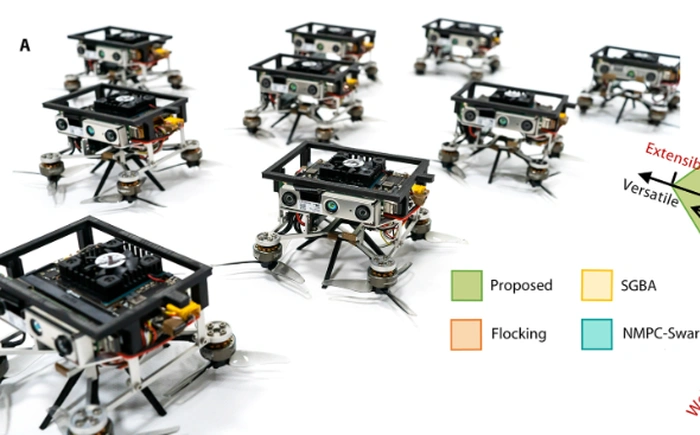
Drohnenschwarm, der Menschen autonom verfolgt

Ein neues wissenschaftliches Forschungspapier wurde diese Woche veröffentlicht mit a Drohnenschwarm von Mikroflugrobotern, die dazu in der Lage sind Menschen verfolgen und durch dichte Wälder fliegen mit Leichtigkeit. Schauen Sie sich das Video unten an, um zu sehen, wie der Drohnenschwarm durch einen dichten Bambuswald navigiert und einen Menschen aus jedem Winkel verfolgt, selbst bei Hindernissen.
Viele Science-Fiction-Filme haben Schwärme von Drohnen gezeigt, die für eine Vielzahl unterschiedlicher Dinge verwendet werden, von der Erkundung unbekannter außerirdischer Schiffe bis hin zur Umzingelung von Raumschiffen als Schutzschild. Mit Drohnen, die in der Lage sind, ihre Flugbahn autonom zu navigieren und zu koordinieren. Jetzt wird Science Fiction dank Forschern und Wissenschaftlern aus in Wirklichkeit Chinas Zhejiang-Universität.
Drohnenschwarm
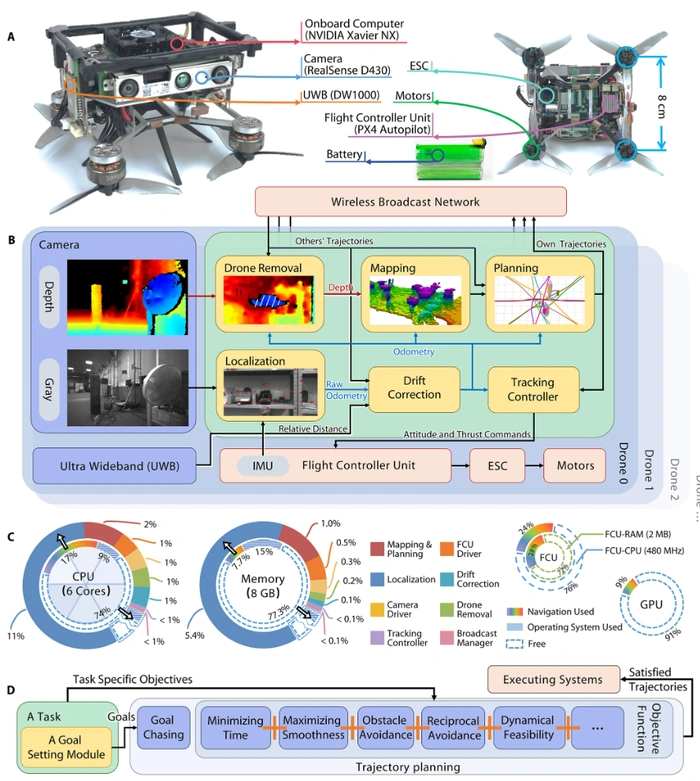
„Luftroboter sind weit verbreitet, aber stark überladene Umgebungen wie dichte Wälder bleiben für Drohnen und noch mehr für Drohnenschwärme unzugänglich. In diesen Szenarien können bisher unbekannte Umgebungen und enge Korridore in Kombination mit Anforderungen an die Schwarmkoordination zu Herausforderungen werden. Um die Schwarmnavigation in freier Wildbahn zu ermöglichen, entwickeln wir kleine, aber vollständig autonome Drohnen mit einem Trajektorienplaner, der basierend auf begrenzten Informationen von Bordsensoren zeitnah und genau funktionieren kann. „

„Das Planungsproblem erfüllt verschiedene Aufgabenanforderungen, darunter Flugeffizienz, Hindernisvermeidung und Kollisionsvermeidung zwischen Robotern, dynamische Machbarkeit, Schwarmkoordination und so weiter, wodurch ein erweiterbarer Planer realisiert wird. Darüber hinaus verformt der vorgeschlagene Planer Trajektorienformen und passt die Zeitzuweisung synchron auf der Grundlage einer räumlich-zeitlichen Verbindungsoptimierung an. „
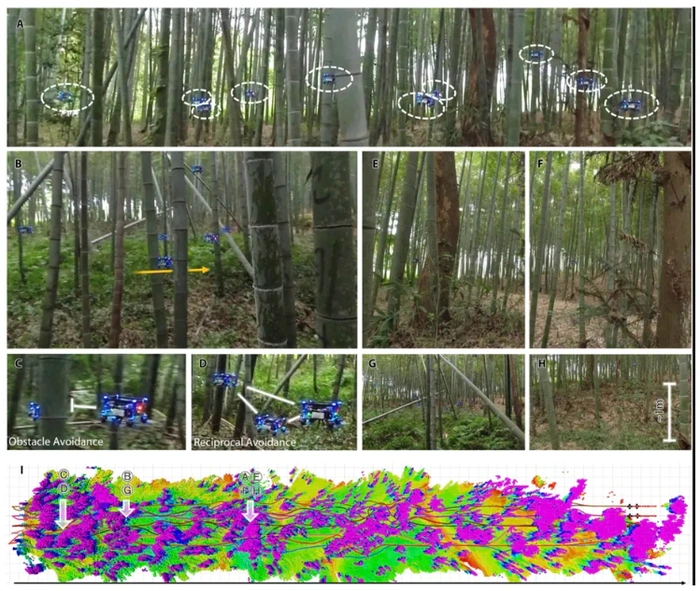
„So kann selbst in engsten Umgebungen innerhalb weniger Millisekunden eine Trajektorie von hoher Qualität nach vollständiger Ausnutzung des Lösungsraums erhalten werden. Der Planer wird schließlich in die entwickelte handflächengroße Schwarmplattform mit integrierter Wahrnehmung, Lokalisierung und Steuerung integriert. Benchmark-Vergleiche bestätigen die überlegene Leistung des Planers in Trajektorienqualität und Rechenzeit. Verschiedene reale Feldexperimente demonstrieren die Erweiterbarkeit unseres Systems. Unser Ansatz entwickelt die Flugrobotik in drei Aspekten weiter: Fähigkeit zur Navigation in unübersichtlichen Umgebungen, Erweiterbarkeit auf verschiedene Aufgabenanforderungen und Koordination als Schwarm ohne externe Einrichtungen.“
Quelle : Wissenschaft
Abgelegt unter: Technologie-News, Top-News

Related Post

Samsung 5G Core für kommerzielles 5G von KDDI
Samsung hat angekündigt, dass sein 5G-Core das kommerzielle 5G-Standalone-Netzwerk von KDDI in Japan mit Strom versorgen wird, das Netzwerk wird...
")
M2 Pro Mac Mini vs. $15.000 Mac Pro (Video)
Der neue M2 Pro Mac Mini bietet eine beeindruckende Leistung, aber reicht das aus, um es mit einem 15.000-Dollar-Mac Pro...

Lucyd Lyte 2.0 Audiobrille
Innovative Eyewear hat diese Woche seine neue Smart Eyewear im vollen Monat vorgestellt Lucyd Lyte 2.0 die mehrere neue Fortschritte...

Neue SUVs BMW X5 und X6 vorgestellt
BMW hat seine neuesten SUVs, den BMW X5 und den BMW X6, vorgestellt, und beide Autos verfügen über eine breite...

Dead Space Remake PS5 gegen Xbox
Wenn Sie sich fragen, wie die Leistung und Grafik sowohl auf der PlayStation 5- als auch auf der Xbox-Konsole aussehen...

Binäre Uhr mit ATmega328P und Arduino
Wenn Sie Ihre eigene binäre Uhr bauen möchten, könnten Sie an einem neuen Projekt interessiert sein, das von Mitglied Taifur...